

Milestone Release 1 |
$5,000 USD | Transfer Complete | TBD |
Milestone Release 2 |
$7,500 USD | Transfer Complete | TBD |
Milestone Release 3 |
$7,500 USD | Transfer Complete | TBD |
Milestone Release 4 |
$7,500 USD | Pending | TBD |
Milestone Release 5 |
$7,500 USD | Pending | TBD |
Milestone Release 6 |
$5,000 USD | Pending | TBD |
We are happy with our progression, currently tackling the hardest problem we encountered so far - creating an accurate map of the environment from orthometric drone images
We are very happy with the progress we are making, and we are moving steadily towards the final output for round 1.
progress is being made and we are happy for the work done and future plans for the project.
completed milestone 1. 90% to milestone 2 completion.





Swarm Robotics is an emerging field of adapting the phenomenon of natural swarms to robotics. It is a study of robots that are aimed to mimic natural swarms, like ants and birds, to form a system that is scalable, flexible, and robust. These robots show self-organization, autonomy, cooperation, and coordination amongst themselves. Benefits of swarms over traditional robotics include fault tolerance, scalability, operational efficiency, and ability to operate in dangerous or hazardous environments.
We have taken inspiration from popular RTS (real-time strategy) games, such as StarCraft and Age of Empires, which have successfully used swarm intelligence and multi-agent AI systems in the past 20+ years.
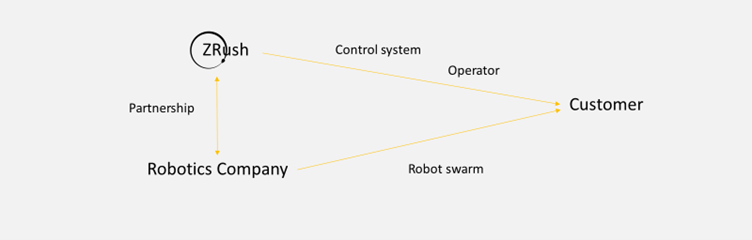
ZRush aims to extend the same mechanics and user experience to real-world practical applications by designing a control system for swarms of robots that combines autonomous swarm behaviour with human piloting and decision-making. The control system focusses on precision, reliability, and flexibility and aims at overcoming the issues that currently limit the use of robot swarms in real-life scenarios.
We have a B2B business model that sees us offering a full package of ZRush control system, robot swarms (provided by Partners), and experienced operators as a service.
Partnerships with robotics companies would give us access to a variety of custom-built robot swarms in order to cover a wide range of applications.
ZRush aims to build an easy to use, intuitive control system that allows human operators to control large swarms of robots accurately and reliably.
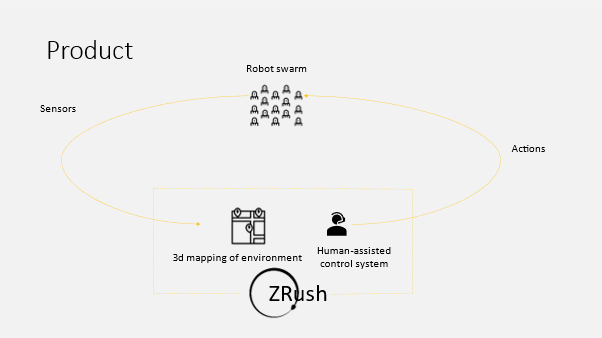
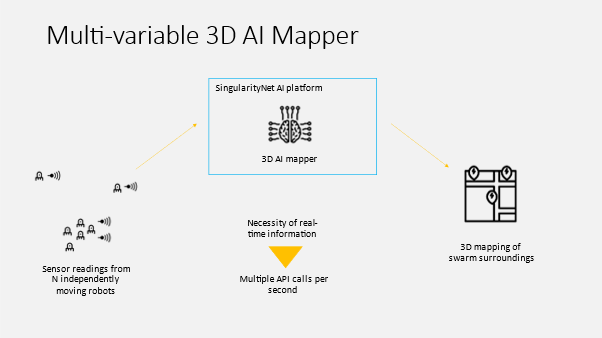
The ZRush control system uses a multi-variable 3D AI mapper to render the environment around the swarm into a 3D map that is displayed on the interface.
The AI mapper will include a number of AI models that each work on a different set of sensors. This will allow ZRush to be compatible with any type of swarm and with any type of sensors mounted on the robots.
The mapper will:
Through ZRush, human operators will be able to control the full swarm, subsets of the swarm, or single robots. Swarm behaviour algorithms allow multiple robots to be controlled as a single entity.
Key Features:
New reviews and ratings are disabled for Awarded Projects

Check back later by refreshing the page.
Signed Contract
$5,000 USD
Litepaper, website design, logo, brand identity
$7,500 USD
System architecture, literature review, and data aquisition
$7,500 USD
Website creation, UI design for interface
$7,500 USD
Model design and training
$7,500 USD
Testing and refinements
$5,000 USD
Please create account or login to post comments.
![]() Reviews & Ratings
Reviews & Ratings
New reviews and ratings are disabled for Awarded Projects
Check back later by refreshing the page.
© 2025 Deep Funding



Sort by